首页
关于我们
公司简介
企业文化
新闻中心
公司动态
行业动态
产品与应用
无杆气缸系列
伺服电机系列
真空元件
技术与服务
常见问题
资料下载
联系我们
0
2
威仕科智能设备(东莞)有限公司
产品中心
了解更多+
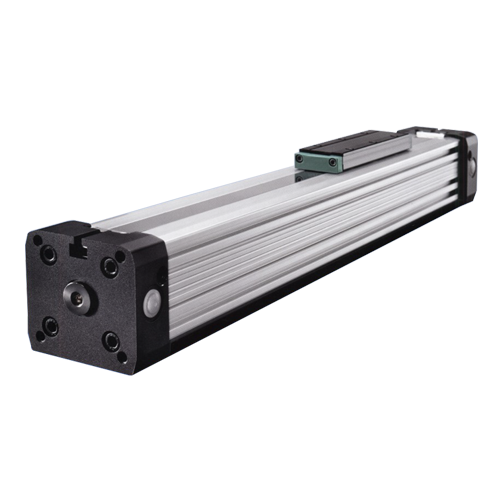
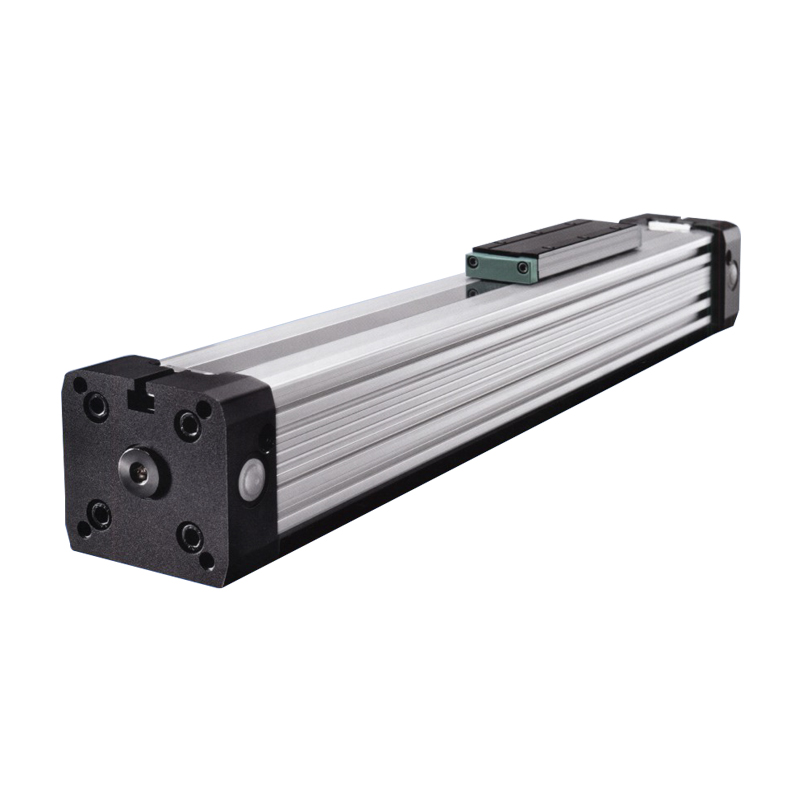
无杆气缸系列
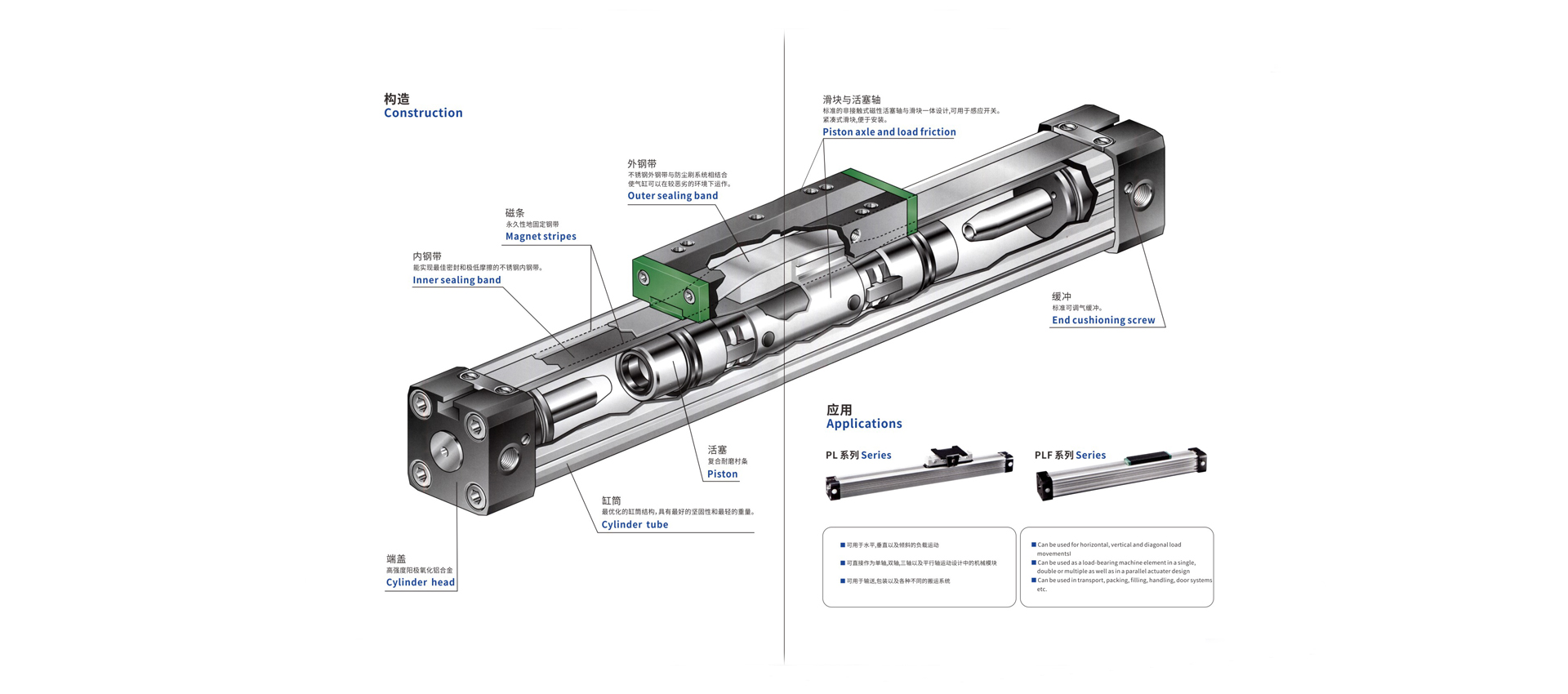
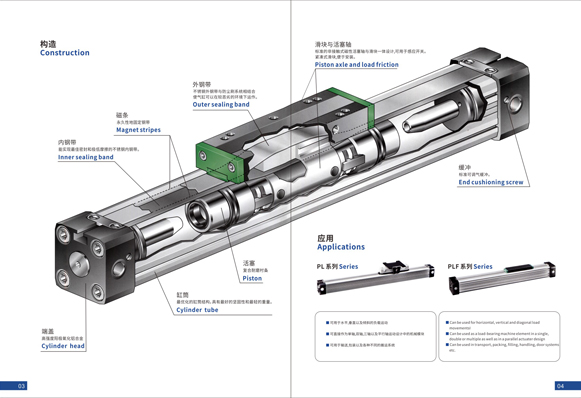
滑块运动的沟槽于轴向贯通整个缸筒,气缸作用力由与活塞成一体的滑块来传递。 推力传递原理如下: 压缩空气推动内部活塞侧面,带动外部滑块做对应方向运动。
无杆气缸系列
滑块运动的沟槽于轴向贯通整个缸筒,气缸作用力由与活塞成一体的滑块来传递。 推力传递原理如下: 压缩空气推动内部活塞侧面,带动外部滑块做对应方向运动。
了解更多
伺服电机系列
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及自动化相关产品的技术型企业。
伺服电机系列
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及自动化相关产品的技术型企业。
了解更多
真空元件
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及自动化相关产品的技术型企业。
真空元件
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及自动化相关产品的技术型企业。
了解更多
热销产品
SEC选型代码
WYQ系列100/125选型代码
WYQ系列伺服电缸
WRQ系列经济型伺服电缸
PLK系列
PLF系列
了解更多+
关于我们
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及自动化相关产品的技术型企业。公司企业核心价值定位为:科技,创新,智造,品质,快速,团队。立足于以科技为本的理念,根据客户需求,准确、快速地提供优质产品及解决方案,帮助客户实现降低企业成本,提高生产效率。
了解更多
最新资讯
公司动态
行业动态
2021-07-23
热烈庆祝威仕科智能装备(东莞)有限公司官网建成!
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及···
热烈庆祝威仕科智能装备(东莞)有限公司官网建成!
2021-07-23
威仕科智能装备(东莞)有限公司是一家集研发、制造和销售无杆气缸、伺服电缸、机器人始端执行器、真空元件及自动化相关产品的技术型企业。公司企业核心价值定位为:科技,创新,智造,品质,快速,团队。立足于以科技为···
伺服电机与气动阀门定位器执行机构的对比
2021-07-23
在常规气缸定位应用上,现场的执行机构上通常有气缸定位器或阀门定位器。该定位器与执行机构如:阀体、翻板门或气缸杆之间有一个机械反馈连接杆,该连接杆直接驱动设计精密、调整繁琐、抗外力冲击差的气缸定位器或阀···
伺服电缸在流体控制中有哪些应用?
2021-07-23
1.什么是伺服电缸:伺服电缸是以标准气缸为主体,以电子气缸定位器为控制核心,通过给定标准模拟量电信号,完成对气缸杠杆伸出从0-100%的全过程连续模拟控制的气动执行组件。2.伺服电缸的结构性能:以标准气缸为主体···
15920255673
手机
0769-86292857
电话
留言
扫一扫
关于我们
公司简介
企业文化
新闻中心
公司动态
行业动态
产品与应用
无杆气缸系列
伺服电机系列
真空元件
技术与服务
常见问题
资料下载
Copyright © 2021 威仕科 All Rights Reserved.
网站地图
返回首页
电话咨询
在线咨询
联系我们
首页
关于我们
公司简介
企业文化
新闻中心
公司动态
行业动态
产品与应用
无杆气缸系列
伺服电机系列
真空元件
技术与服务
常见问题
资料下载
联系我们











 扫一扫
扫一扫
 返回首页
返回首页 电话咨询
电话咨询 在线咨询
在线咨询 联系我们
联系我们